테슬라 AI 데이 2022에서 발표된 FSD Lanes Neural Network는, 차량 주변의 차선 정보를 단순 2D 선분이 아니라 3차원 구조와 연결 정보까지 포함해 “언어(language)”처럼 이해·추출하려는 테슬라의 새롭고 확장된 접근법입니다. 이때 핵심 개념 중 하나로 Vision Map Language가 등장하는데, 이는 시각 정보(카메라로부터 얻은 장면)를 하나의 “지도 언어”로 간주하여, 교차로·합류 차선·유턴 차선 등 복잡한 차선 구조를 체계적으로 표현하고 학습하기 위한 테슬라 내부의 신경망 프레임워크를 의미합니다.
아래에서는 1) FSD Lanes가 기존 접근과 어떻게 다른지, 2) Vision Map Language가 어떤 식으로 동작하며 FSD Lanes에 기여하는지, 3) 전체적인 동작 흐름과 의의를 단계별로 정리해 보겠습니다.
1) 배경과 필요성
단순 차선 인식의 한계
• 이전 자율주행 세대에서는 주로 2D 이미지 기반 차선 검출(흰 선/노란 선 등)에 의존했습니다.
• 교차로, 합류/분기 차선, 여러 차선이 겹치는 고속도로 램프 구간 등에서는 2D 차선만으로는 구조를 제대로 파악하기 어렵습니다.
3D 환경 및 위상(Topology) 인식 중요성
• 실제 주행에서 ‘이 차선이 어디서 갈라지고, 어디와 이어지는지’, ‘어떤 차선이 좌회전 전용인지’ 등을 안다면, 플래닝과 안전성이 크게 향상됩니다.
• 이를 위해서는 차선을 일종의 “그래프 구조”로 파악하고, 구체적으로 각 차선이 어떤 노드(교차점)와 연결되어 있는지를 알아야 합니다.
테슬라의 Vision-first 철학
• 라이다나 정밀지도 없이 카메라(비전) 정보만으로도 충분히 정밀한 3D 구조를 뽑아낼 수 있다고 보는 테슬라의 철학이 FSD Lanes에도 반영되었습니다.
• 즉, 멀티 카메라 영상 → 신경망으로 3D 공간 복원 및 차선 토폴로지 파악 → 플래닝에 직접 활용하는 엔드투엔드 방식.
2) FSD Lanes Neural Network란?
- 개념 요약
• FSD Lanes: 테슬라 FSD(Full Self-Driving) 소프트웨어에서 차선 정보를 표현하는 새로운 신경망 아키텍처.
• 이전에는 2D 차선 검출 맵을 Bird’s Eye View(위에서 본 평면)로 바꾸는 정도였지만, 이제는 차선 자체를 “벡터 형태(3D 곡선)”로 추출하고, 이들이 서로 어떻게 연결되는지를 토폴로지 그래프 형태로 표현합니다.
- Vision Map Language와의 연관
• Vision Map Language는 일종의 “장면을 표현하는 언어”로, 도로·차선·분기점·신호 정보 등을 “토큰(token)”처럼 취급하여 관계(relationship)를 학습하는 모델입니다.
• FSD Lanes가 만들어낸 “차선 벡터”와 “차선 연결 정보” 역시 이 언어의 일부 토큰이 되어, ‘이 차선은 좌회전 전용, 저 차선은 우회전 후 합류’ 같은 복잡한 문맥을 모델이 이해하게 됩니다.
- 내부 구조(추정)
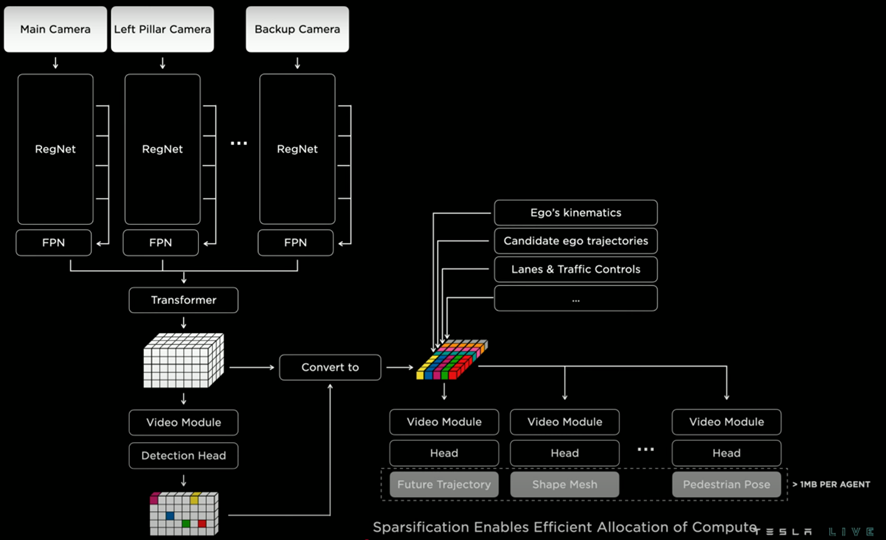
멀티 카메라 입력 → 피쳐 추출
• 전방/측면/후방 카메라 등 8개(또는 그 이상의) 카메라로부터 CNN·Transformer 기반 특징을 추출.
3D 구조 추론
• Occupancy Network 또는 유사한 3D 신경망 구조를 활용해, 도로 면(driveable surface)과 차선의 곡률, 높이, 교차 정보를 3D 형태로 복원.
차선 연속성과 연결성 모델링
• 차선이 어디서 갈라지고(분기), 어디서 다시 합류되는지를 그래프 형태로 표현.
• 이 “그래프 노드”와 “엣지(edge)”가 곧 Vision Map Language에서 말하는 “언어 토큰”이 됨.
토큰(차선 노드·엣지) 간 Attention
• Transformer 방식으로, 서로 다른 차선 토큰 간의 관계를 모델링해, 최종적으로 ‘차선 지형(Topology)’을 확정.
• 이 정보는 곧 FSD 플래닝 모듈로 넘어가, 안전하고 합리적인 경로를 결정할 수 있게 도움을 준다.

3) Vision Map Language: ‘지도 언어’란 무엇인가?
- “언어”로서의 표현
• 테슬라가 AI 데이에서 제안한 “비전 맵 언어(Vision Map Language)”는, 지도(도로 구조)를 문장처럼 구성 요소(단어, 토큰)로 나누고, 이 토큰들 간 관계(문법·구문)를 파악해 전체 맥락을 이해한다는 개념입니다.
• 예: “차선 A → (직진) → 차선 B, 차선 B → (우회전) → 차선 C”와 같이, 도로 위 모든 차선이 서로 어떻게 이어지는지(문법 구조)를 해석하는 셈.
- 학습 방식
• 대규모 주행 데이터에서 실제 도로 환경을 학습해 “이런 형태의 교차로에서는 이런 식으로 차선이 나뉜다” 같은 규칙성을 신경망이 자연스럽게 터득.
• 이후 새로운 교차로를 만났을 때, 이 언어 모델(Transformer 등)이 “유사 패턴을 찾아내” 어떤 차선이 어느 쪽으로 이어지는지 추론·보정.
- 주요 장점
복잡 교차로 대응
• 2D 차선 검출만으로는 불가능했던, 다중 분기·합류가 있는 고속도로 램프나 도시 복합 교차로에서 정확한 구조를 파악 가능.
유연성
• 글로벌 정밀지도(HD Map) 없이, 오직 비전 데이터만으로도 현재 도로 구성을 “언어 구조”로 만들어 낼 수 있으므로, 지도 업데이트가 필요 없는 엔드투엔드 접근이 가능해짐.
확장성
향후 표지판, 신호등, 건물, 심지어 보행자 이동 경로 등의 토큰도 추가해 더 풍부한 맵 언어를 구성할 수 있음.
4) FSD Lanes와 Vision Map Language의 결합 이점
차선 정확도 향상
• 단순 선분 검출이 아닌 3D 토폴로지 + “언어” 해석으로, 차선이 갑자기 끊기거나 잘못 합류되는 오류가 크게 줄어듦.
실시간 플래닝 개선
• 플래닝 모듈이 “이 차선은 좌회전-only, 옆 차선은 직진” 같은 구체 정보를 알면, 교통 흐름에 맞춰 매끄럽게 차선 변경·교차로 진입을 계획할 수 있음.
지도 의존도 감소
• 지도(HD Map)가 부족하거나 업데이트가 늦은 지역에서도, 카메라로 얻은 시각 정보만으로 충분히 차선 구조를 파악 가능.
• 이는 테슬라가 “지도 의존을 최소화하겠다”고 주장하는 전략과 부합.
정리하면
• FSD Lanes Neural Network는 테슬라 자율주행 스택에서 차선 정보를 단순 라인 검출이 아닌 3D 벡터+토폴로지 그래프로 추상화하여, 훨씬 정교한 도로 이해 능력을 제공합니다.
• Vision Map Language 구성 요소로서, 차선 토큰들이 어떠한 “문법”으로 연결·분기·합류되는지를 신경망이 “문장 해석”하듯 학습하는 점이 AI 데이 2022에서 큰 화제를 모았습니다.
• 이를 통해 테슬라는 “3D 지도로부터 직접 플래닝을 하는 완전 비전 기반 자율주행”을 한층 구체화하고 있으며, 장기적으로는 지도 업데이트 부담을 덜고, 다양한 지역·복잡 교차로에서도 안정적인 주행을 구현하려 하고 있습니다.
결국 FSD Lanes + Vision Map Language는 테슬라가 추구하는 엔드투엔드 비전 자율주행에서 “도로 환경을 어떻게 이해하고 표현하느냐”에 대한 중요한 해답이며, 향후 FSD의 학습 효율과 주행 성능을 획기적으로 높이는 핵심 요소로 자리 잡게 될 것으로 전망됩니다.
'자율주행' 카테고리의 다른 글
| Automated 3D Labelling by multi-trip reconstruction (0) | 2025.05.07 |
|---|---|
| FSD Networks in Car (0) | 2025.05.04 |
| 데이터 엔진(Data Engine): 전 세계 테슬라 차량으로부터의 실시간 학습 루프 (0) | 2025.04.28 |
| End-to-End 학습의 개념: 입력부터 조향·제어까지 (0) | 2025.04.25 |
| Motion Planning using Network TOO (0) | 2025.04.22 |



